






Lennart Melzer
2019
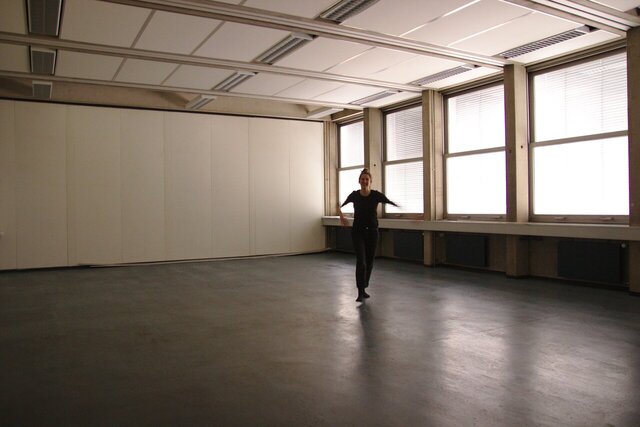
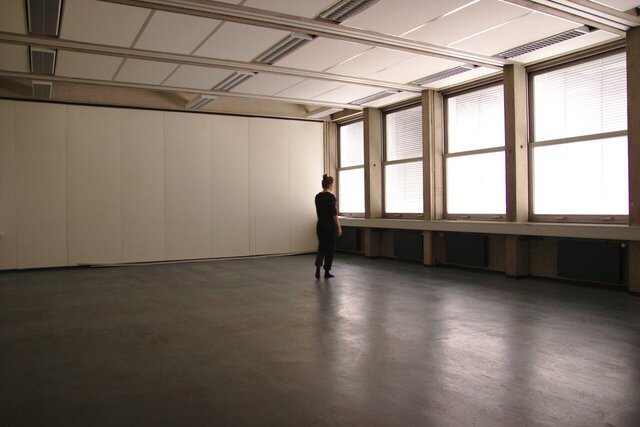
Ich wollte mit Sensoren und Aktuatoren arbeiten, wollte Instrumente bauen, habe mit Ultraschallsensoren experimentiert und bin dabei auf die Idee gekommen eine Brille damit zu bauen. Mit dieser Brille wollte ich ein Tanzstück konzipieren. Um also tanzen zu können, habe ich angefangen mich mit der Technik weiter zu beschäftigen, bis ich feststellte, dass ich eine Erweiterung einer mir bereits bekannten Tanzübung erforschen wollte.
Der Bau einer solchen Brille stellte sich als aufwendiger und langwieriger heraus als erwartet und zudem stellte ich mir die Frage, wie dieses Tanzstück wäre, wenn ich gar keine Brille hätte. Hätte ich keine Brille und auch somit keinen Computer im Sinn, so würde stattdessen das Augenschließen ausreichen und anstelle des Computertons eine menschliche Stimme zum Einsatz kommen.
Mir gefiel es, dass sich das Konzept, ausgehend von der mir bekannten Tanzübung, auch ohne Computer und die Brillenentwicklung weiterdurchdenken konnte. Ich trennte also meine Forschung und Entwicklung auf und arbeitete nun parallel sowohl an der Brille, als auch an der Vermittlung des eigentlichen Konzepts und probierte Stimmübungen zur Orientierung aus.
Es war angenehm an der Brille weiterarbeiten zu können, ohne das sie zwingend funktionieren musste, damit ich das Tanzstück ausprobieren konnte. Nach den ersten Proben ohne Computerstimme und Brille (die Brille war auch noch nicht einsatzbereit) hatte ich den Eindruck damit das Konzept reduziert zu haben. Zudem kamen mir menschlichen Stimmen und Augenschließen wie eine weitaus neutralere Variante meiner ursprünglichen, techniklastigen Vorstellung vor.
Nach der darauffolgenden Probe mit Brille musste ich jedoch feststellen, dass auch die menschliche Stimme einen gegebenenfalls unangenehmen Nebeneffekt hatte: Die Assoziation von Klängen, die wir als Stimme identifizieren, mit Sprache, mit Kommunikation und in diesem Fall mit „angeschrien werden. Sich also stattdessen von einem Synthesizerklang „führen“ zu lassen kann also auch als angenehm neutral im Vergleich zur „Führung“ durch die menschliche Stimme empfunden werden. In jedem Fall wandelt sich meine Vorstellung und somit auch die Gestalt dieses Projekts kontinuierlich. Das dahinterliegende Konzept jedoch scheint mir mehr und mehr klar zu werden und bleibt dabei konstant.
Eine Brille ist gemeinhin eine Unterstützung bei Sehschwäche. Die Entwicklung der Brille in diesem Projekt scheint mir hierbei die Unterstützung bei „meiner“ Sehschwäche zu sein. Ich beginne zu sehen, was ich eigentlich vorhatte und durch die Beschäftigung mit der Technik häufig übersehe. Darüber hinaus hilft mir die Arbeit an der Brille dennoch auch in anderen Fällen – Im Falle der Stimme bspw. – auch dort etwas Gestaltendes zu sehen, das ich bisher eher als neutral empfunden habe. Unabhängig davon hilft die von mir konzipierte Brille nicht besser zu sehen. Ebenso dient die Stimme in meinem Stück nicht der Orientierung, vielmehr dem Schutz.
Das Konzept hingegen...





Für zwei Tänzer (A, B)
und eine Stimme (C).
A und B sehen nicht.
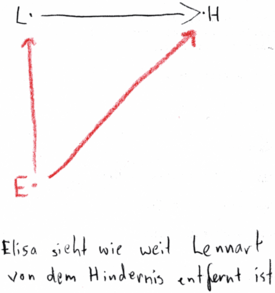
C sieht nur den (eingeschränkten) Blickwinkel von A und B.
C kann nur zwei Parameter in drei Stufen modulieren.
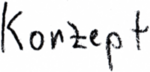
Die Distanz zum nächsten Hindernis in As Blickwinkel ist an Cs ersten Parameter gebunden. Eine für As Bewegung kritisch kurze Distanz zum nächsten Hindernis bedeutet eine minimale Ausprägung des ersten Parameters von Cs stimme.
Ab einer nicht mehr kritischen Distanz wechselt der erste Parameter auf die nächsthöhere Stufe. Ist die Distanz derart groß, dass A sich effektiv „frei“ bewegen kann, wechselt der erste Parameter zur maximalen Ausprägung.
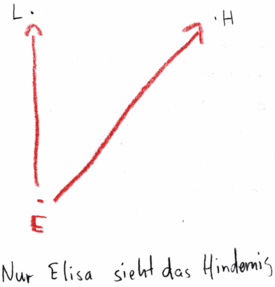
Die Distanz zum nächsten Hindernis in Bs Blickwinkel ist an Cs zweiten Parameter gebunden. Sie folgt ansonsten den gleichen Regeln.
C passt effektiv auf A und B auf. A und B verlassen sich in ihren Bewegungen jeweils auf den an sie gebundenen Parameter (und dessen Ausprägung) in Cs Stimme.
Eine beispielhafte Auswahl konkreter Parameter wären:
der jeweiligen Stimme (C).
Die ursprüngliche Idee der Komposition stammt aus einer Bewegungs-/ Tanzübung (Kontaktimprovisation/zeitgenössischer Tanz):
In einem Duo tanzen je eine Sehende und eine Blinde. Die Sehende führt die Blinde.
Als Erweiterung der Übung werden (bei mehreren solcher Duos) während des Duetts die Blinde freigelassen und von einer anderen Sehenden weitergeführt.
Die Blinde wechselt also die Partner und verlässt sich dabei auf sich selbst und — um Hindernisse zu vermeiden — auf die jeweils gerade führende Sehende.
Am Ende kehren Blinde und Sehende zu ihren ursprünglichen Partnern zurück.
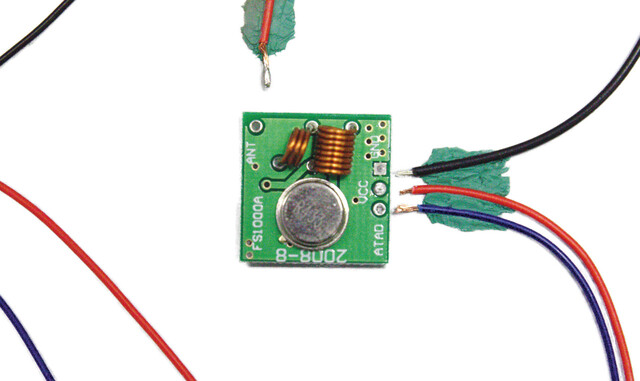
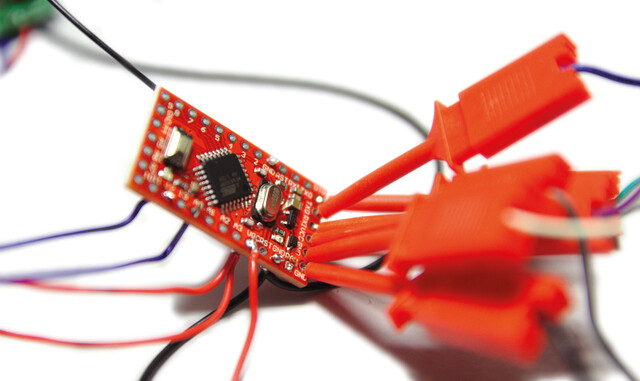
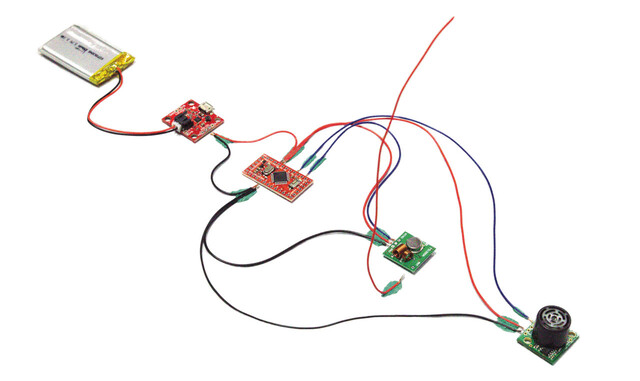
In meinem Ansatz sind also beide Duopartner blind und verlassen sich auf die durch die Ultraschallbrille gelieferten, auditiven Feedbacks.
Zusammen kontrollieren sie einen Synthesizer:
die
durch die Brille gemessene Distanz zum
nächstliegenden Hindernis wird als Parameter für den
Synthesizer verwendet. Die gemessene Distanz der ersten
Tänzerin wird bspw. für die Tonhöhe und die der Zweiten
für die Lautstärke verwendet (vgl. Theremin).
Eine Variation, die zudem noch möglich wäre funktioniert ohne Elektronik:
Das Duo hat lediglich verbundene oder einfach geschlossene Augen und erhält das auditive Feedback durch Sängerin oder Instrumentalistin, die die jeweiligen, oben beschriebenen Distanzen in Gesang, oder Klang wandeln. Da die Lautstärke hierbei Aufschluss über die Distanz (einer der Tänzerinnen) gibt, ist ggf. ein Blasinstrument, das durch Zirkulation gespielt wird, notwendig, damit ein kontinuierlicher Ton erklingt.
Vgl. Topfschlagen.




#include <Arduino.h>
#include <RH_ASK.h>
#include <SPI.h>
#define ECHO_PIN 0
RH_ASK rf_driver;
float anVolt, inches;
unsigned long mm = 0;
void read_sensor() {
anVolt = map(analogRead(ECHO_PIN),
0, 1023, 0, 3300);
inches = anVolt / 9.8;
mm = inches * 25.4;
}
void setup() {
rf_driver.init();
}
void loop() {
read_sensor();
rf_driver.send((uint8_t *)&mm,
sizeof mm);
rf_driver.waitPacketSent();
delay(100);
}
p = SerialPort("/dev/redswitchleft",
baudrate: 115200,
crtscts: true);
Tdef(\arduino, {
var byte, str, res, args;
inf.do { |i|
if(p.read == 10, {
str = "";
while({ byte = p.read;
byte != 13 }, {
str = str ++ byte.asAscii;
});
str.postln;
Ndef(\sine).set(
\distance,
str.asInteger
);
});
};
}).play;
Ndef(\sine, { |mm = 190|
var step = mm.linexp(90, 1500, 1, 3),
freq = 4 - step.floor * 300,
sound = SinOsc.ar(freq);
sound = sound * AmpCompA.ar(sound);
Out.ar(0, sound);
}).play













The pitch of the audible signal is arranged to indicate the distance of the object from which the echo came – high pitch means distant objects, low pitch near ones. The amplitude of the signal codes for the size of the irradiated object (loud-large, soft-small) and texture of the object is represented by clarity of the signal.
Interessant, ob diese Parameter gemessen bzw. ob die Sänger dies ebenfalls abbilden können. Prüfen ob relevant!
Skintimacy is an interface that allows for the manipulation of electronic-based processes through touch. Depending on whom you touch, the way your bodies make contact influences the control of both analog instruments and digital setups. We developed Skintimacy by implementing an Arduino microcontroller to transfer data to software platforms in order to provide diverse opportunities for a playful control of audio and video. This kit is intended to facilitate the symbiotic relationship between physical computing and the sense of touch. The straightforward design of the device allows for experimentation in many different contexts. Taking into account the dynamic nature of skin conductivity, which varies individually, one has the possibility to create highly responsive installations.
Textile pressure sensors located on the palm of the glove enable the deafblind user to “lorm” onto his or her own hand to compose text messages. [...] The Mobile Lorm Glove [...] supports mobile communication over distance, e.g. text message, chat or e-mail, and it enables parallel one-to-many communication, which is especially helpful in school and other learning contexts.
Menschen neigen dazu zu atmen, daher ist es im Falle einer menschlichen Stimme ratsam in kurzen Atemstößen Laute zu erzeugen. Andernfalls – also bei einem durchgehend erzeugten Ton – kann es zu Verwirrungen kommen, sobald die Stimme (C) aufgrund von Atmung aussetzt und somit „fälschlicherweise“ die Lautstärke reduziert, was als Fehlinformation von A bzw. B gedeutet werden kann.
Dank an:
Elisa Kühnl
& Elisa Metz